






Introduction
Dans le cadre du développement de sa branche d’activité photogrammétrique, TPLM-3D, en plus de sa compétence en photogrammétrie aéroportée et architecturale, souhaite développer son savoir-faire aux spécificités de la photogrammétrie appliquée aux petits objets.
Le terme petit objet doit être défini, pour TPLM-3D un objet compris entre quelques centimètres (comme un artefact archéologique) et quelques mètres (comme une statue ou un bas-relief) est considéré comme un petit objet.
Les spécificités des acquisitions de petits objets vont des limitations dues aux lois de l’optique jusqu’aux complications de traitements causées par les matériaux composant les objets. La diversité d’objets auxquels la société TPLM-3D peut être confrontés rend l’étude particulièrement intéressante. Notamment en considérant la mise en place de protocoles d’acquisition et de traitement des données suffisamment souples pour s’adapter à chaque configuration rencontrée ; mais également rigoureux afin de pouvoir garantir la qualité des données produites.
Pourquoi utiliser la photogrammétrie ?
De nouveaux développements dans le domaine de la photogrammétrie apparus au début des années 2000 ont permis d’accroître l’intérêt pour les méthodes photogrammétriques au sein de la communauté métrologique.
Les excellentes performances des algorithmes de détection de points d’intérêt tel que SIFT [Lowe99] et d’appariement permettent d’obtenir un grand nombre d’observations et de calculer les paramètres internes et externes (orientations et distorsions) des caméras avec une grande précision et ceci de manière quasi-automatique. De plus, les algorithmes de corrélation dense permettent d’obtenir des nuages de points d’une densité extrêmement importante, indépendamment de la taille de l’objet. Les algorithmes de Multi-View Stereo (extrayant de l’information tridimensionnelle à partir d’images orientées) qui ne cessent de s’améliorer [Seitz06], à la fois du point de vue des performances mais également de l’automatisation des processus, proposent un large éventail de choix de procédures et de traitements.
De plus, la photogrammétrie permet de travailler à diverses échelles à moindre coût. Alors que la lasergrammétrie nécessite du matériel adapté aux dimensions de l’objet ou de la scène mesuré. La photogrammétrie permet d’obtenir des nuages de points denses de n’importe quelle structure en choisissant seulement un protocole d’acquisition des clichés et un objectif adaptés.
Les points délicats
En photogrammétrie appliquée aux petits objets, deux types de contraintes sont couramment rencontrées. Les problématiques liées à la taille des objets ainsi que les problématiques induites par la diversité des formes et des textures.
Problématiques liées à la petite taille des objets
Comme l’ont remarqué Nicolae et al. [Nicolae14] certains problèmes reviennent couramment lors d’acquisitions photogrammétriques de petits objets.
Le principal concerne la gestion de la profondeur de champ, c’est-à-dire la zone nette sur l’image. En effet, les distances de mise au point et focale mises en œuvre lors des acquisitions, afin d’obtenir des tailles de pixel-objet (taille qu’un pixel sur l’image représente dans la réalité) requises pour ces projets, impliquent de courtes profondeurs de champ. Ainsi le photogrammètre doit acquérir les clichés en utilisant un diamètre d’ouverture (diaphragme) faible permettant d’augmenter la profondeur de champ. Le diaphragme limitant l’intensité lumineuse exposée au capteur, la sensibilité du capteur doit être augmentée. Cependant lorsque la sensibilité du capteur augmente, le rapport signal sur bruit (SNR) diminue, ce qui limite les possibilités de traitement.
Toute la finesse du photogrammètre revient à trouver un bon compromis afin d’avoir le minimum de flou et de bruit sur ses images, notamment en travaillant la lumière et les acquisitions avec soin.
Un des autres problèmes couramment rencontrés est celui de la mise à l’échelle du modèle obtenu. En effet, les algorithmes photogrammétriques permettent d’obtenir des distances relatives à un facteur d’échelle près. Ainsi, il est nécessaire de définir cette échelle, par exemple en utilisant des points de calage. Cependant, étant donné les dimensions impliquées dans ces projets, il devient complexe d’obtenir des mesures des points de calage suffisamment précises afin d’effectuer une mise à l’échelle correspondant à l’exactitude requise par ce type de projet.
Problématiques liées aux textures
Les petits objets possèdent une grande diversité de textures. Ces variations de texture nécessitent d’adapter le protocole à chaque acquisition. La texture de l’objet a une grande influence sur la détection de points d’intérêt ou sur les algorithmes de corrélation dense.
Les surfaces uniformes offrant peu de points caractéristiques rendent les algorithmes de détection de points d’intérêt (comme SIFT) peu efficace. Les travaux de Lovisa et al. [Lovisa15] ont montré qu’il était possible d’obtenir de très bon résultats grâce à l’application de textures (peinture acrylique) sur les objets. Ces textures nécessitent cependant des solvants puissants afin d’être retirées. TPLM-3D en s’inspirant de ces travaux a mis au point une texture efficace pouvant être retirée par un simple coup de chiffon ou de jet d’eau. En s’inspirant des travaux de Koutsoudis et al. [Koutsoudis13] , TPLM-3D à également pu améliorer ses techniques de traitements logiciels d’objets faiblement texturés.
Les objets spéculaires (réfléchissants) présentent d’autres difficultés. La radiométrie de l’objet n’est pas uniforme mais change selon le point de vue et donc de la position de la caméra. Ces variations sont complexes à appréhender, et peuvent rendre les traitements impossibles ou les résultats bruités. Bien que très prometteurs, les algorithmes de modélisation de ces réflexions sont encore trop expérimentaux pour être opérationnels. TPLM-3D contourne alors le problème soit en matifiant les objets, soit en travaillant l’éclairage de l’objet.
 (a) (a) |
 (b) (b) |
| Figure 1.1 – Deux extraits du même détail d’une pièce métallique vu selon deux angles différents. La texture change énormément d’aspect selon le point de vue. | |
Différents capteurs
TPLM-3D est équipé de deux types de capteurs photographiques, un Canon EOS 5D mark II au format 35 mm permettant d’obtenir des images d’une excellente qualité. La densité du nuage de points étant entre autres dépendante de la taille du pixel sur le capteur, l’utilisation de ce capteur avec un pixel de 6.41 μm permet ainsi d’obtenir des nuages denses.
Mais également une GoPro Hero 4 qui grâce à son faible encombrement, sa légèreté et son objectif grand angle permet d’acquérir des données même dans les zones difficiles d’accès. Le grand champ de vision de l’objectif grand angle permet d’obtenir des images stables même lorsque le recul est faible. Grâce à la souplesse de la sensibilité du capteur et du temps d’exposition, la caméra est capable de s’adapter facilement à un grand nombre de conditions d’illuminations.
Une méthode complémentaire à la lasergrammétrie
Les méthodes photogrammétriques et lasergrammétriques, loin d’être concurrentes sont complémentaires. Alors que la photogrammétrie permet d’obtenir une densité de données extrêmement élevée, la lasergrammétrie permet d’obtenir des données d’une précision parfaitement connue et maitrisée. La combinaison des deux méthodes permet ainsi d’obtenir des modèles toujours plus proches de la réalité.
Les produits issus de la photogrammétrie appliquée aux petits objets
Grâce aux acquisitions photogrammétriques, TPLM-3D est capable de produire différents types de données permettant de répondre aux besoins de ses clients à savoir :
- des nuages de points denses ;
- des modèles 3D ;
- des maillages ;
- des orthophotos.
 (a) (a) |
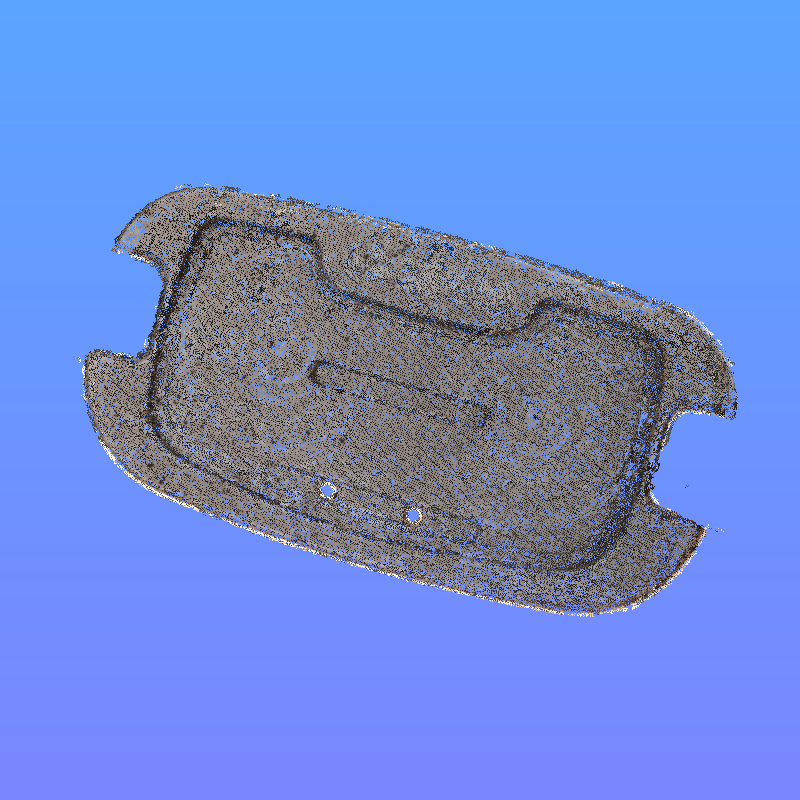 (b) (b) |
| Figure 1.2 – Photographie (a) et nuage de points dense (b) d’une pièce métallique. | |
Références
- [Koutsoudis13] : A. Koutsoudis, B. Vidmar, et F. Arnaoutoglou.
Performance Evaluation of a Multi-Image 3D Reconstruction Software on a Low-Feature Artefact.
Journal of Archaeological Science, 40(12):4450-4456, 2013. - [Lovisa15] : A. C. Lovisa, D. J. Henderson, et J. D. Ginger.
An Inexpensive Method for Measuring Deformation of Corrugated Cladding Using Close Range Photogrammetry.
Experimental Mechanics, 55(3):599-609, 2015. - [Lowe99] : D. G. Lowe.
Object recognition from local scale-invariant features.
Dans Proceedings of the Seventh IEEE International Conference on Computer Vision, 2:1150-1157, Corfu, 1999. - [Nicolae14] : C. Nicolae, E. Nocerino, F. Menna, et F. Remondino.
Photogrammetry Applied to Problematic Artefacts.
The International Archives of Photogrammetry, Remote Sensing and Spatial Information Sciences, 40(5):451, 2014. - [Seitz06] : S.M. Seitz, B. Curless, J. Diebel, D. Scharstein, et R. Szeliski.
A Comparison and Evaluation of Multi-View Stereo Reconstruction Algorithms.
2006 IEEE Computer Society Conference on Computer Vision and Pattern Recognition, 1:519-528, 2006.






























